石鑫华视觉
NI Calibration Training Interface标定训练接口程序2020~2023版教程
淘宝购买地址
https://item.taobao.com/item.htm?id=588471537322
教程适用对象:LabVIEW初学者,有一点LabVIEW基础(PDF需要点基础)或零基础(视频可以零基础),想学习LabVIEW+NI VISION图像处理与机器视觉的用户,LabVIEW深入应用者,或者是学习能力强,看看官方说明书都可以学会的,请注意是否适用,视频与PDF教程均可以在机器视觉论坛VISIONBBS.COM试读试看。如果试读试看,觉得适用就拍,如果觉得不适用就不要拍。如果试读试看了觉得适用,买了后又说教程不适用,那就不是作者的问题而是自己的问题了。
教程与源代码种类比较多,下单前请仔细了解好商品是不是自己需要的。本店所有教程类商品(包含PDF、视频)、源代码、方案等,一经售出,概不退换货。因为不确定您是不是已经将购买的教程、方案等看完了再申请退货,又或者将源代码留个备份在电脑上,说要退货。
本系列教程均为PDF电子版或视频版,无纸质版。本标定训练单独购买时使用电子邮件发送PDF,不使用加密U盘。和其它套餐配合购买时,使用加密U盘一起发送。
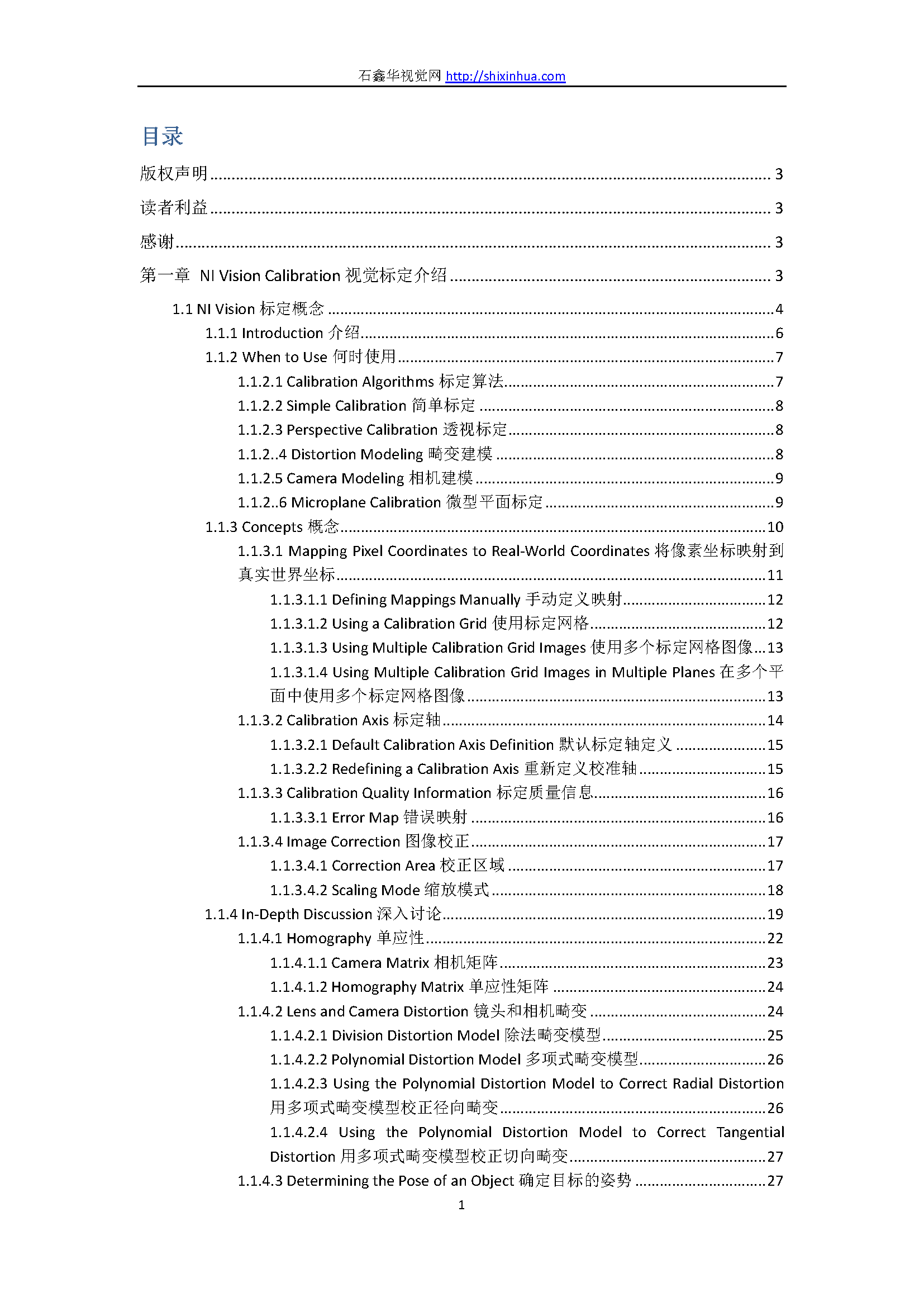
目录
版权声明 3
读者利益 3
感谢 3
第一章 NI Vision Calibration视觉标定介绍 3
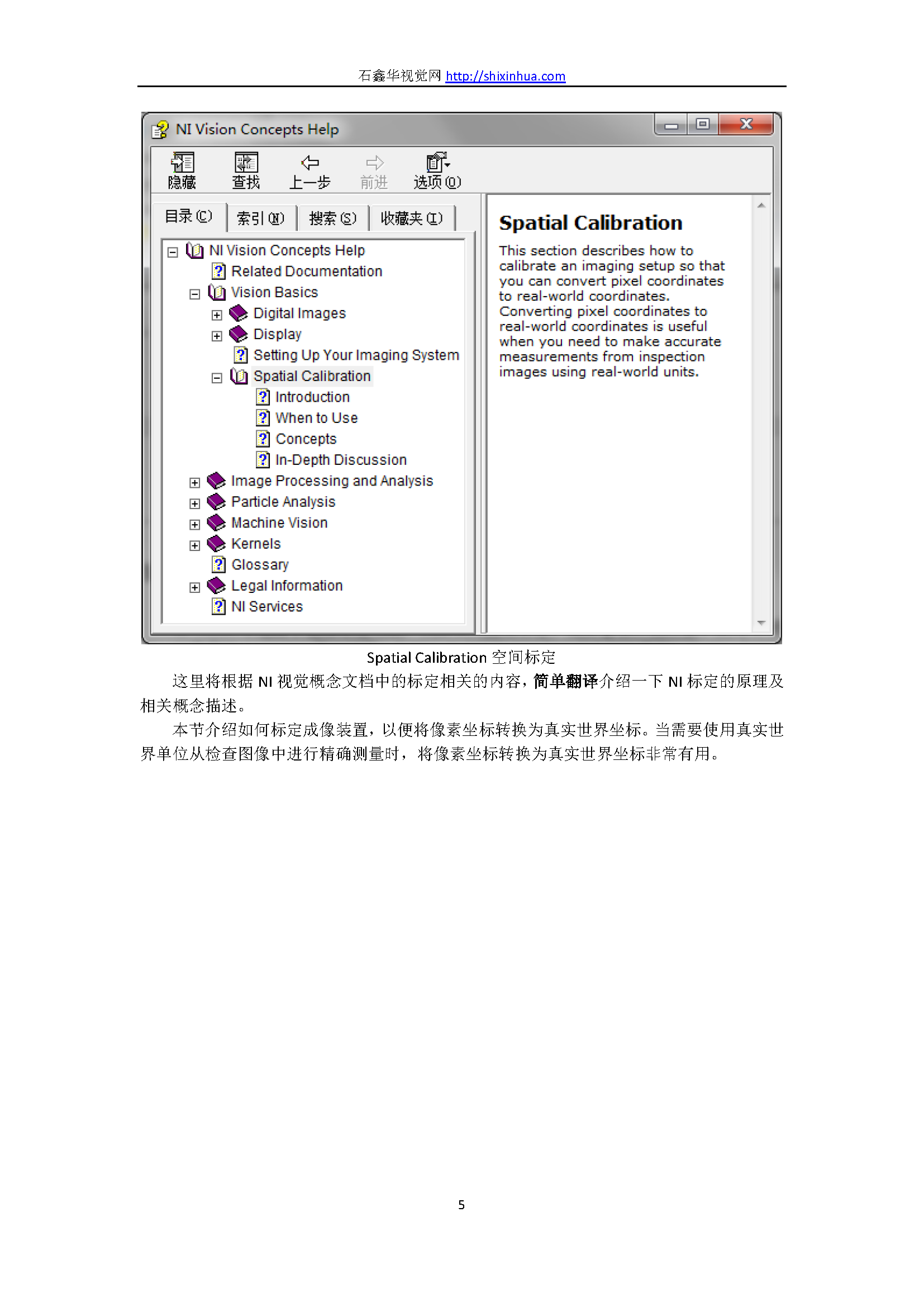
1.1 NI Vision标定概念 4
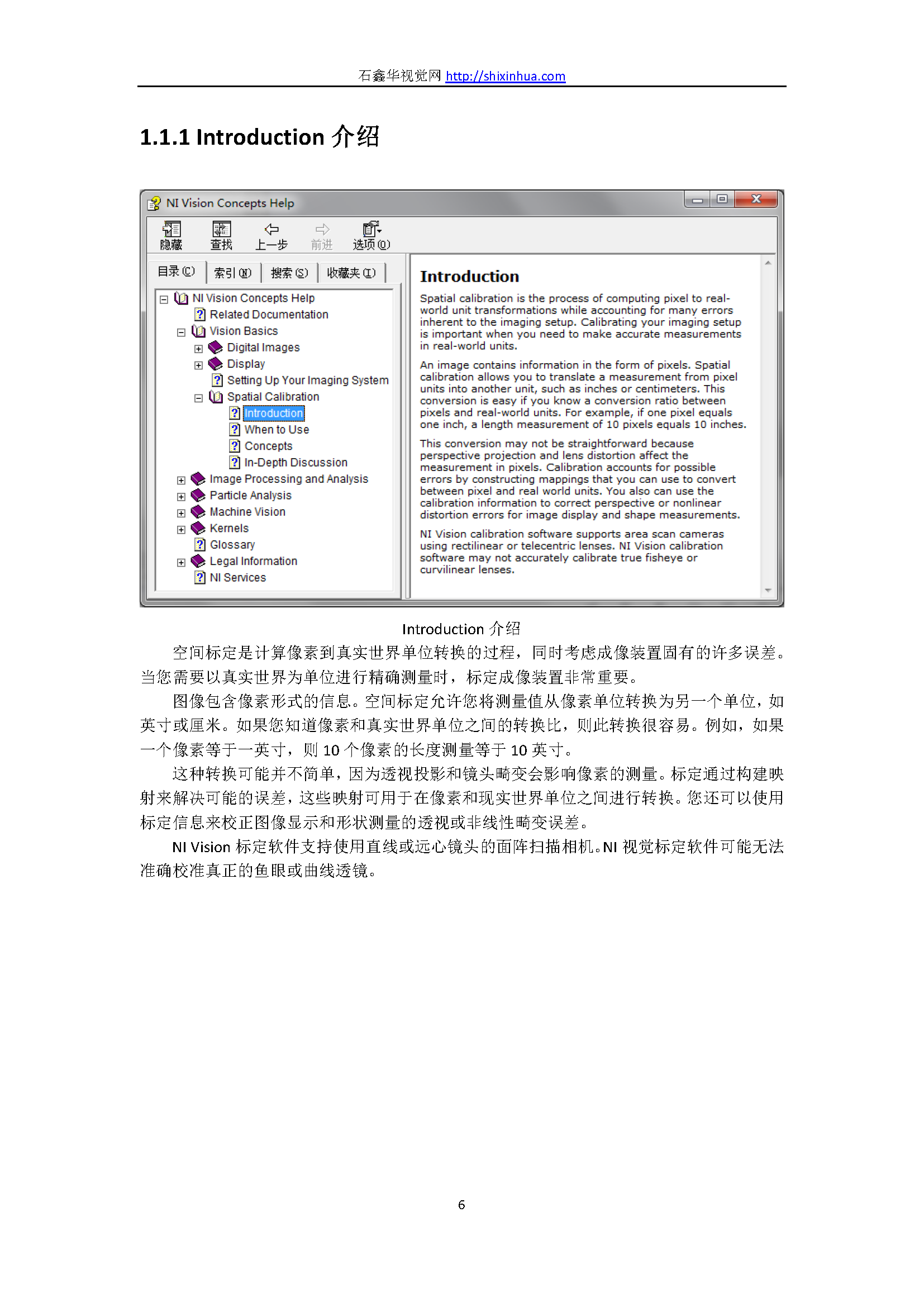
1.1.1 Introduction介绍 6
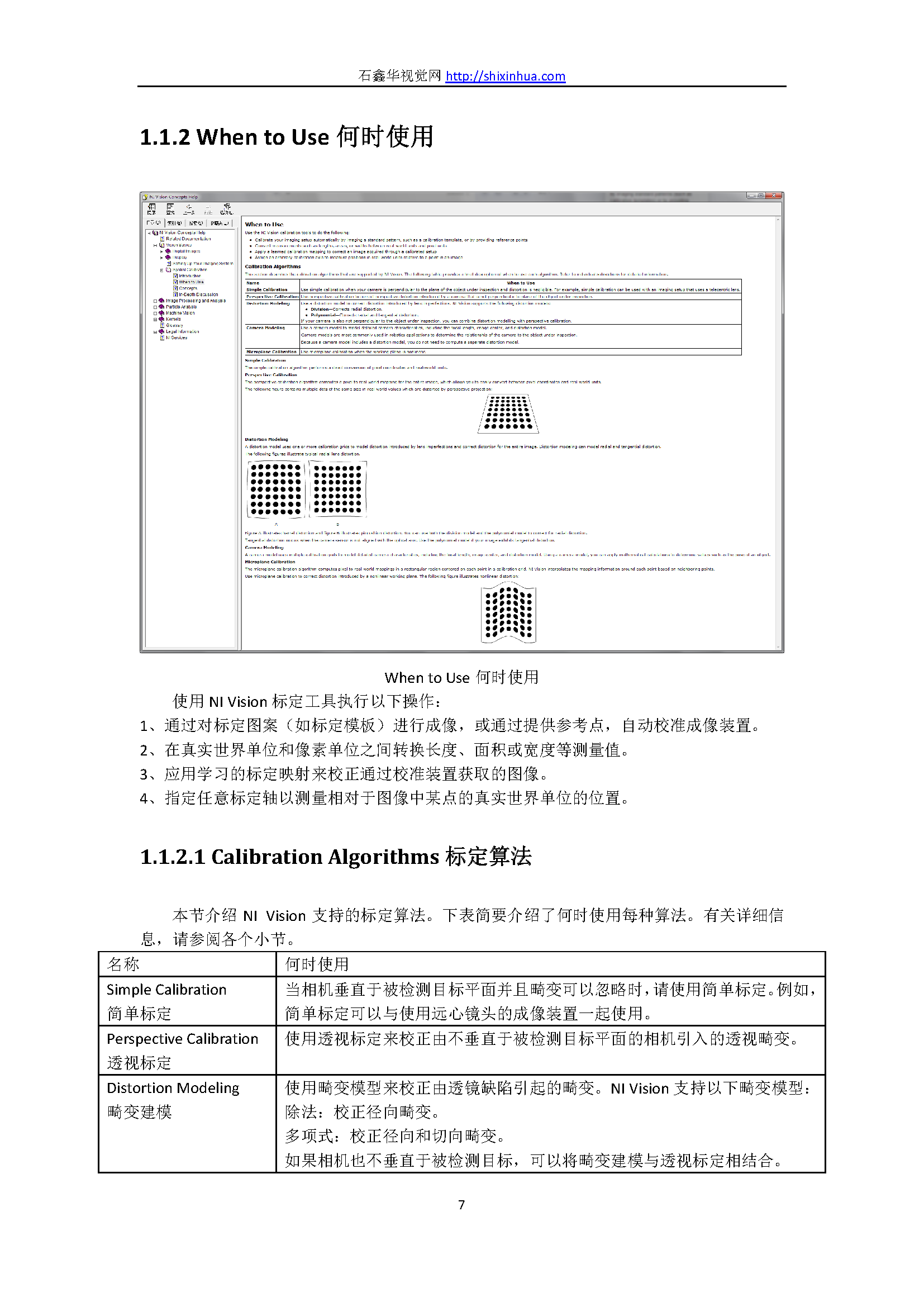
1.1.2 When to Use何时使用 7
1.1.2.1 Calibration Algorithms标定算法 7
1.1.2.2 Simple Calibration简单标定 8
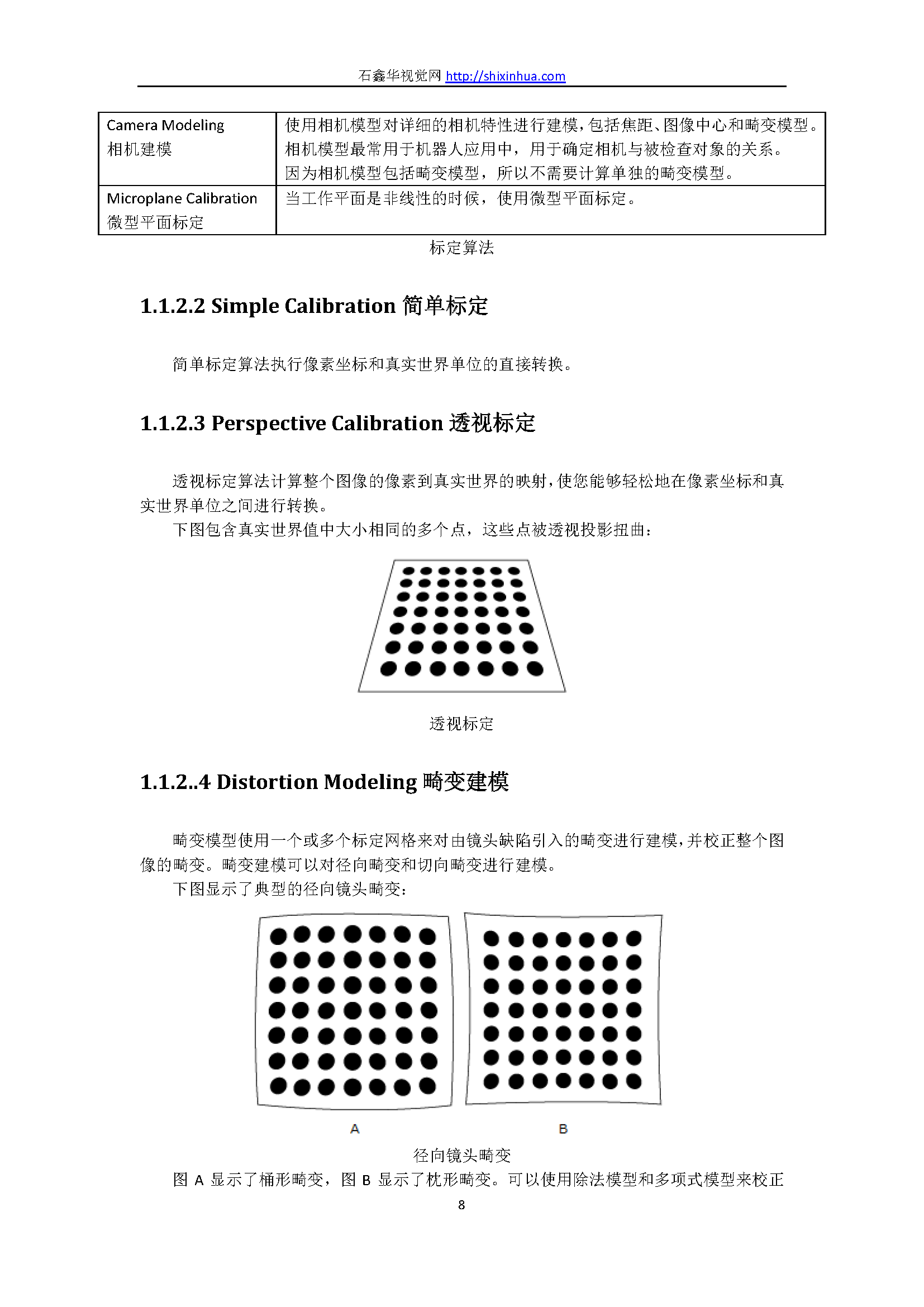
1.1.2.3 Perspective Calibration透视标定 8
1.1.2..4 Distortion Modeling畸变建模 8
1.1.2.5 Camera Modeling相机建模 9
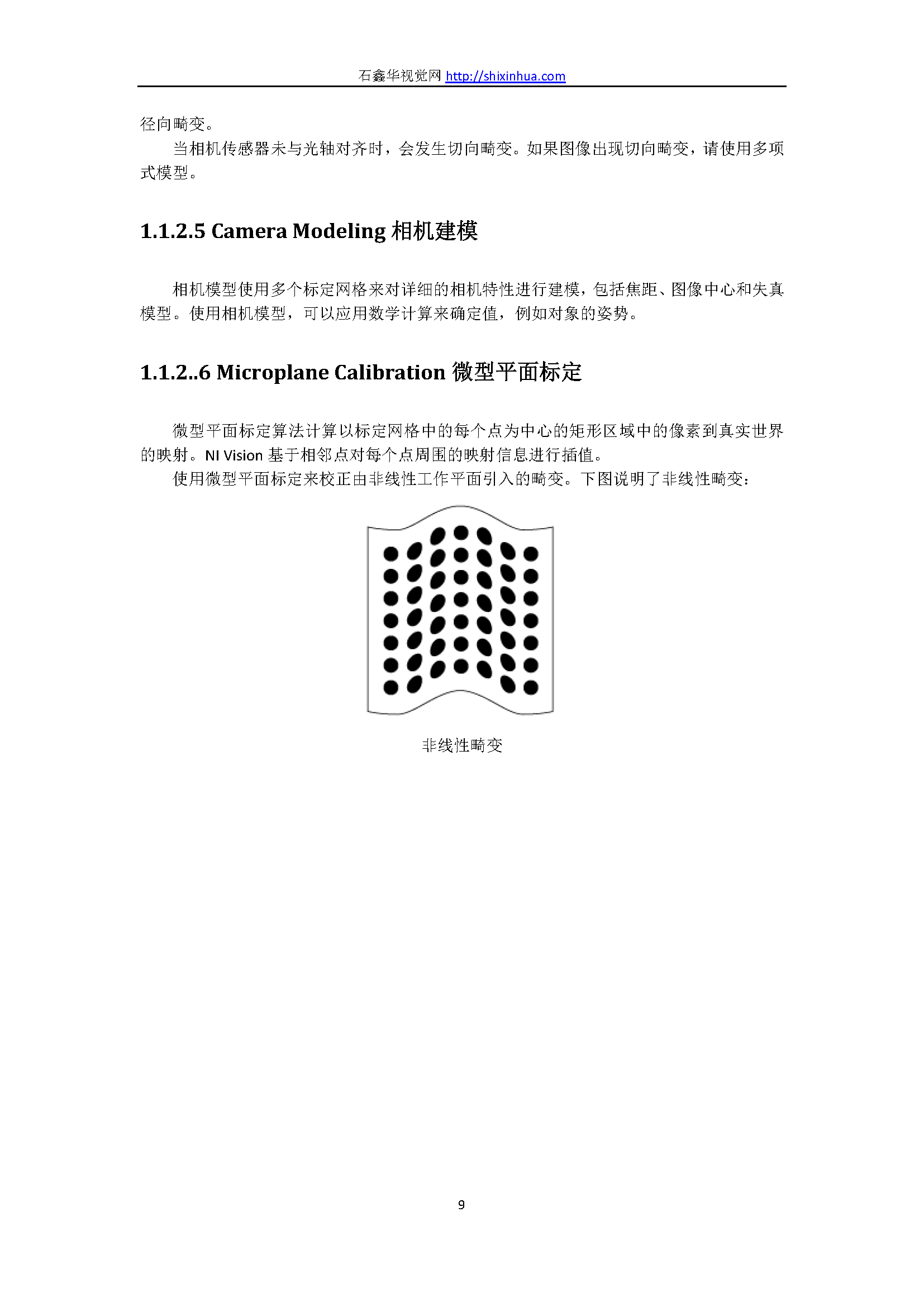
1.1.2..6 Microplane Calibration微型平面标定 9
1.1.3 Concepts概念 10
1.1.3.1 Mapping Pixel Coordinates to Real-World Coordinates将像素坐标映射到真实世界坐标 11
1.1.3.1.1 Defining Mappings Manually手动定义映射 12
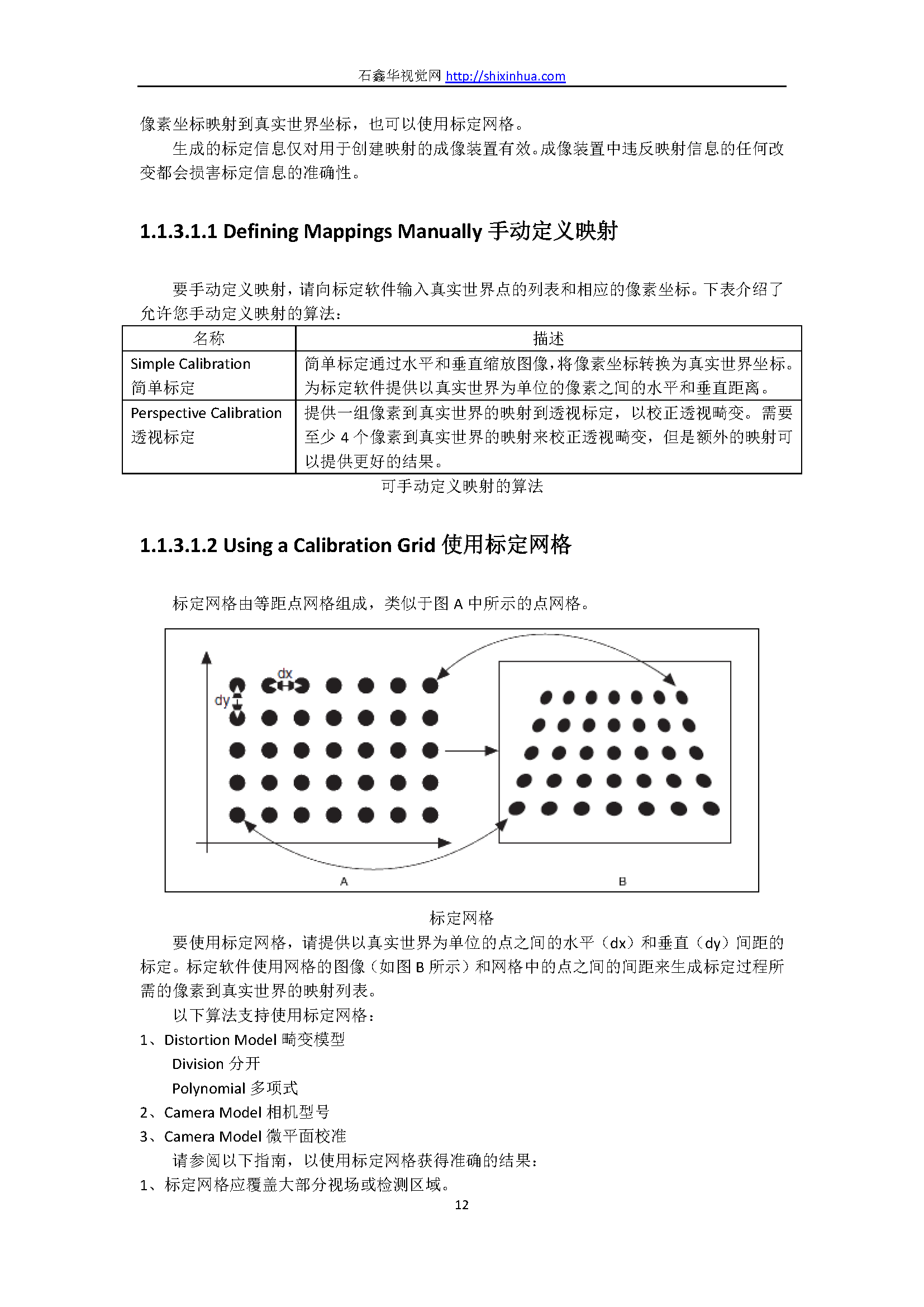
1.1.3.1.2 Using a Calibration Grid使用标定网格 12
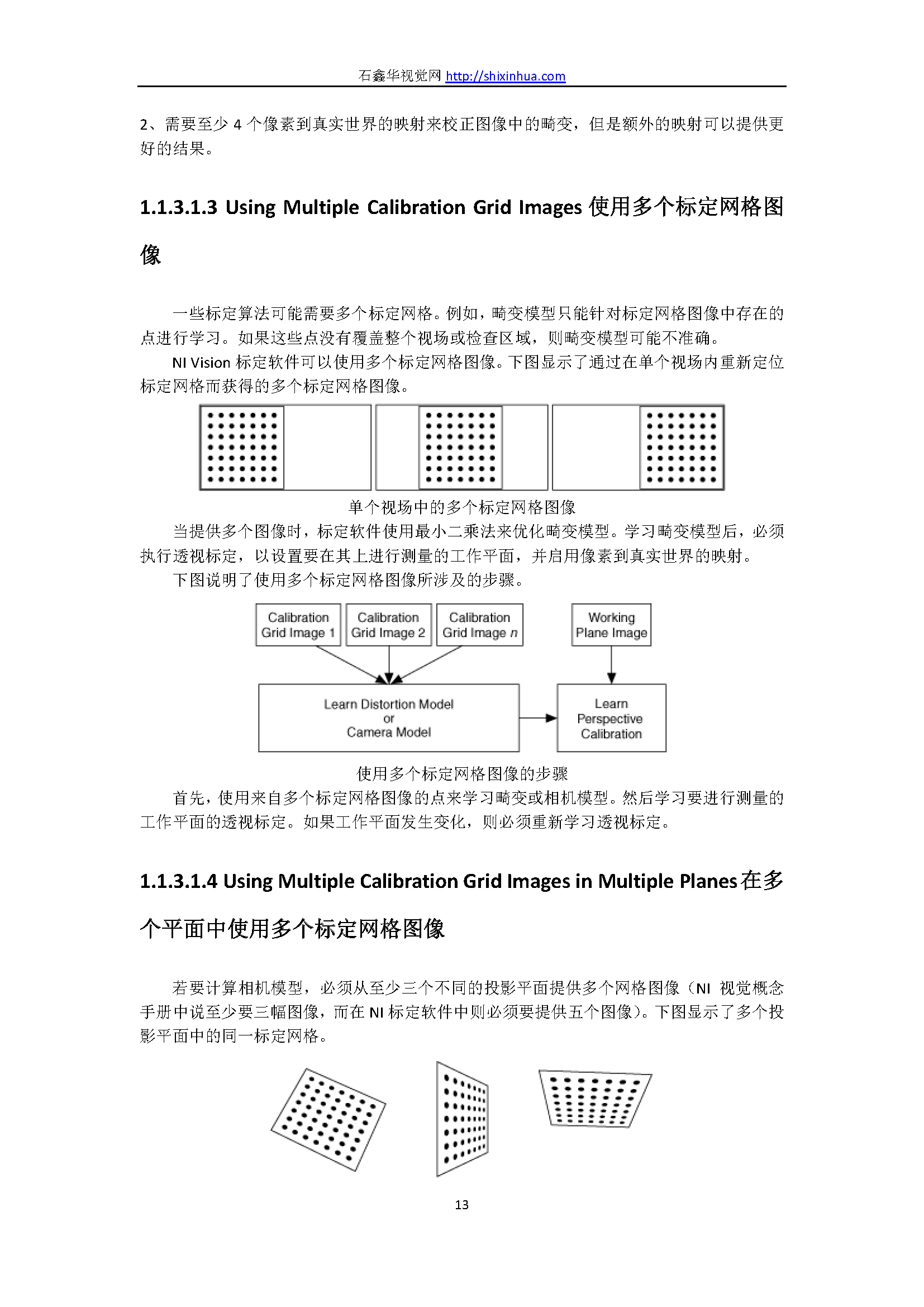
1.1.3.1.3 Using Multiple Calibration Grid Images使用多个标定网格图像 13
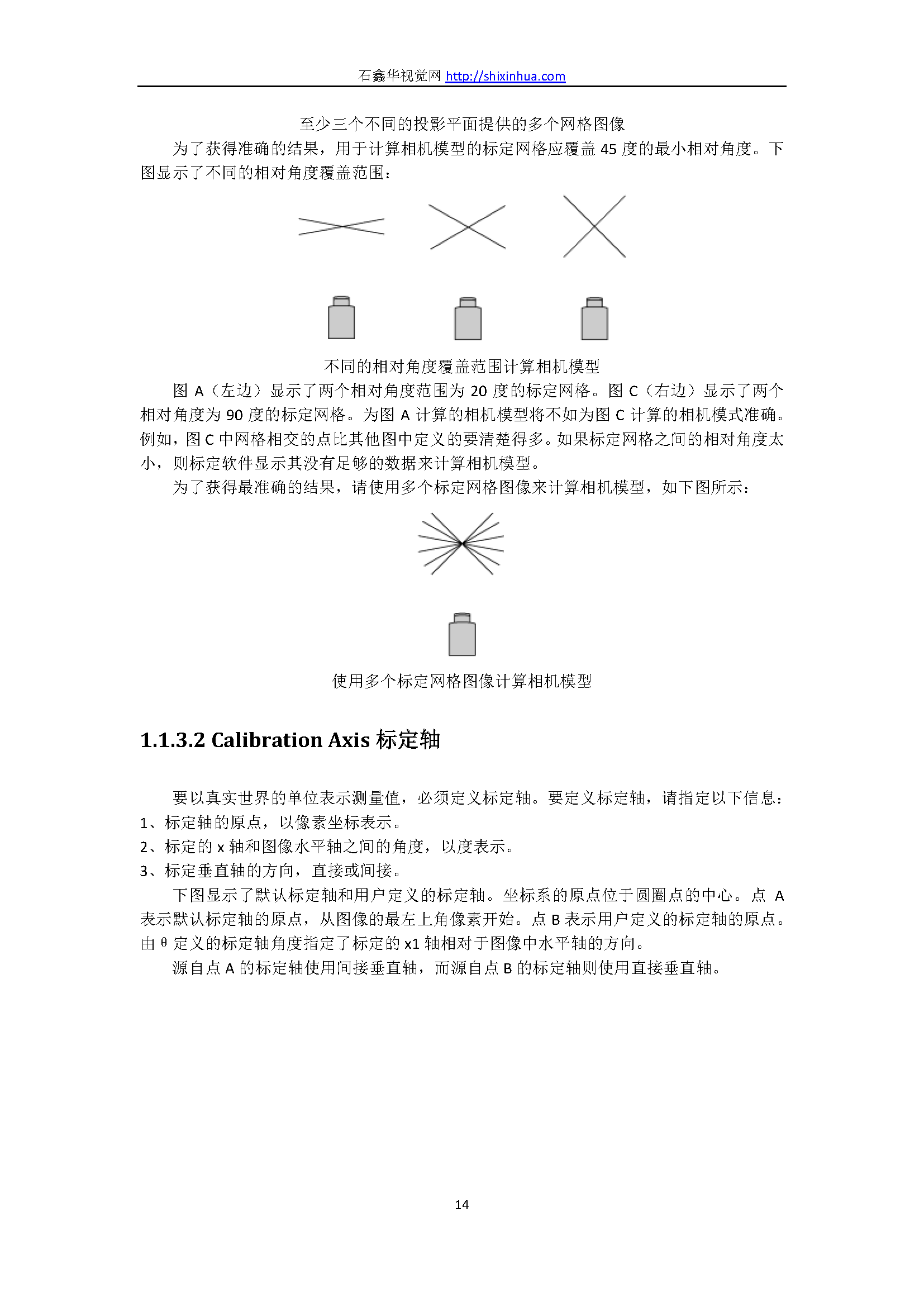
1.1.3.1.4 Using Multiple Calibration Grid Images in Multiple Planes在多个平面中使用多个标定网格图像 13
1.1.3.2 Calibration Axis标定轴 14
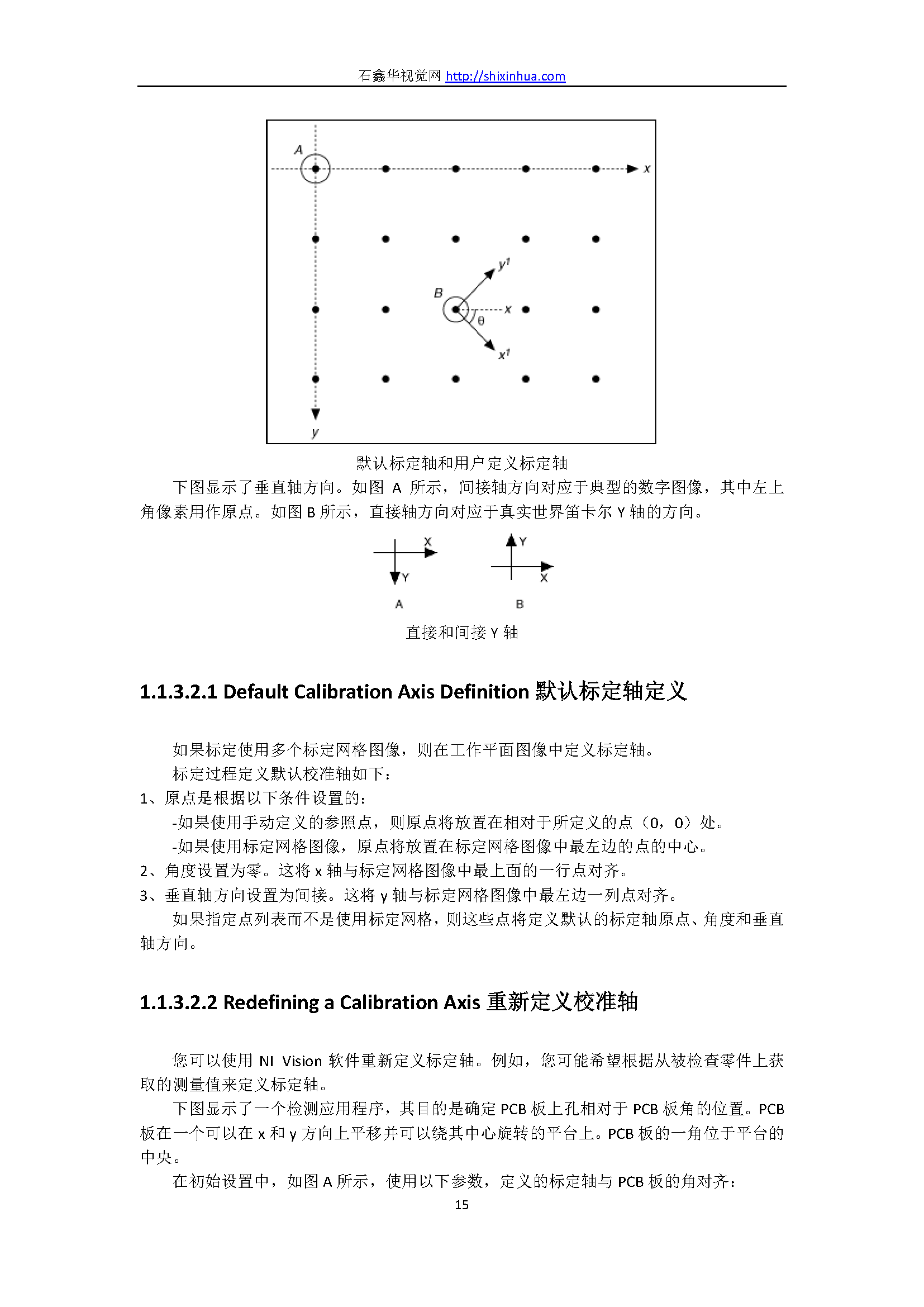
1.1.3.2.1 Default Calibration Axis Definition默认标定轴定义 15
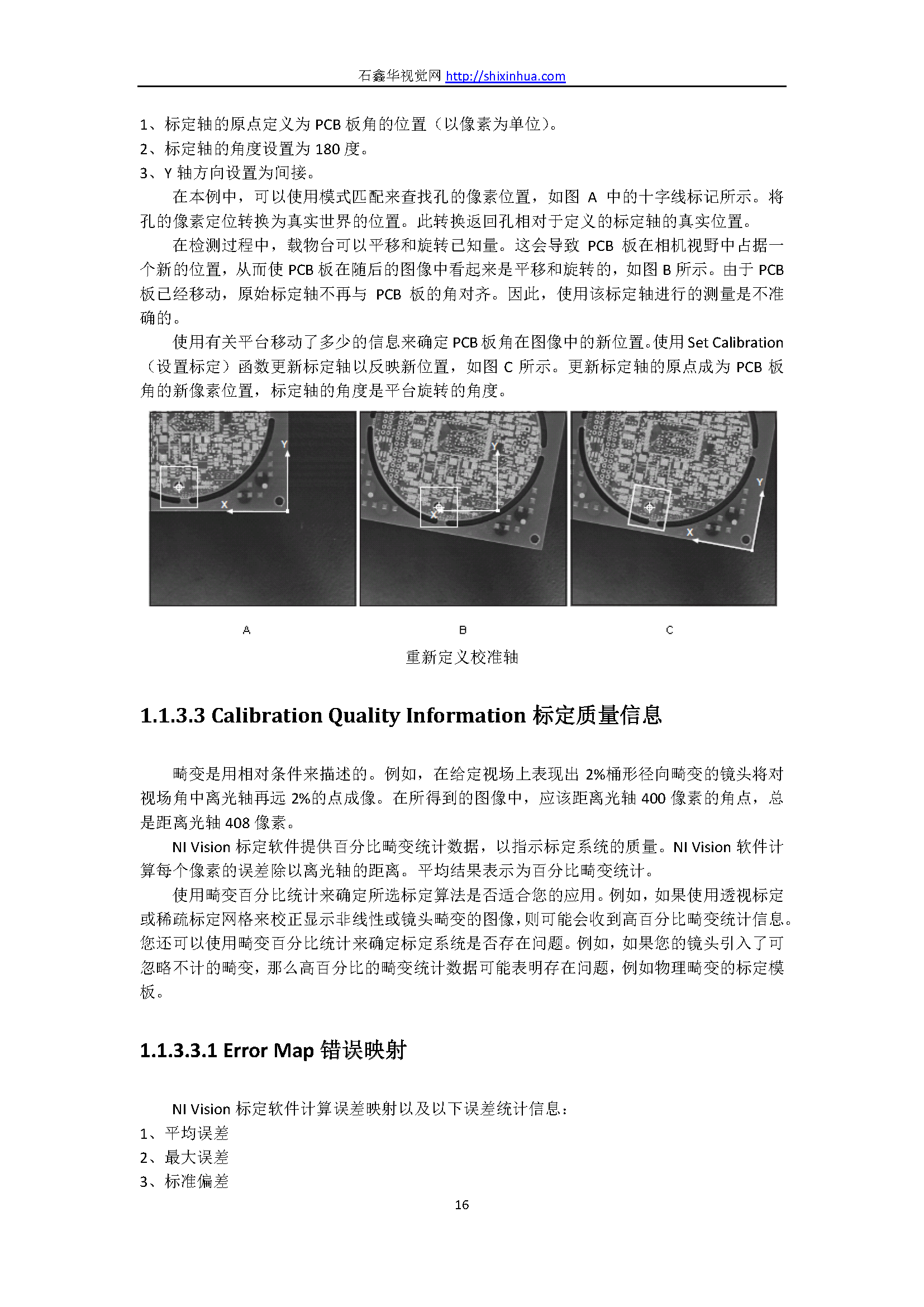
1.1.3.2.2 Redefining a Calibration Axis重新定义校准轴 15
1.1.3.3 Calibration Quality Information标定质量信息 16
1.1.3.3.1 Error Map错误映射 16
1.1.3.4 Image Correction图像校正 17
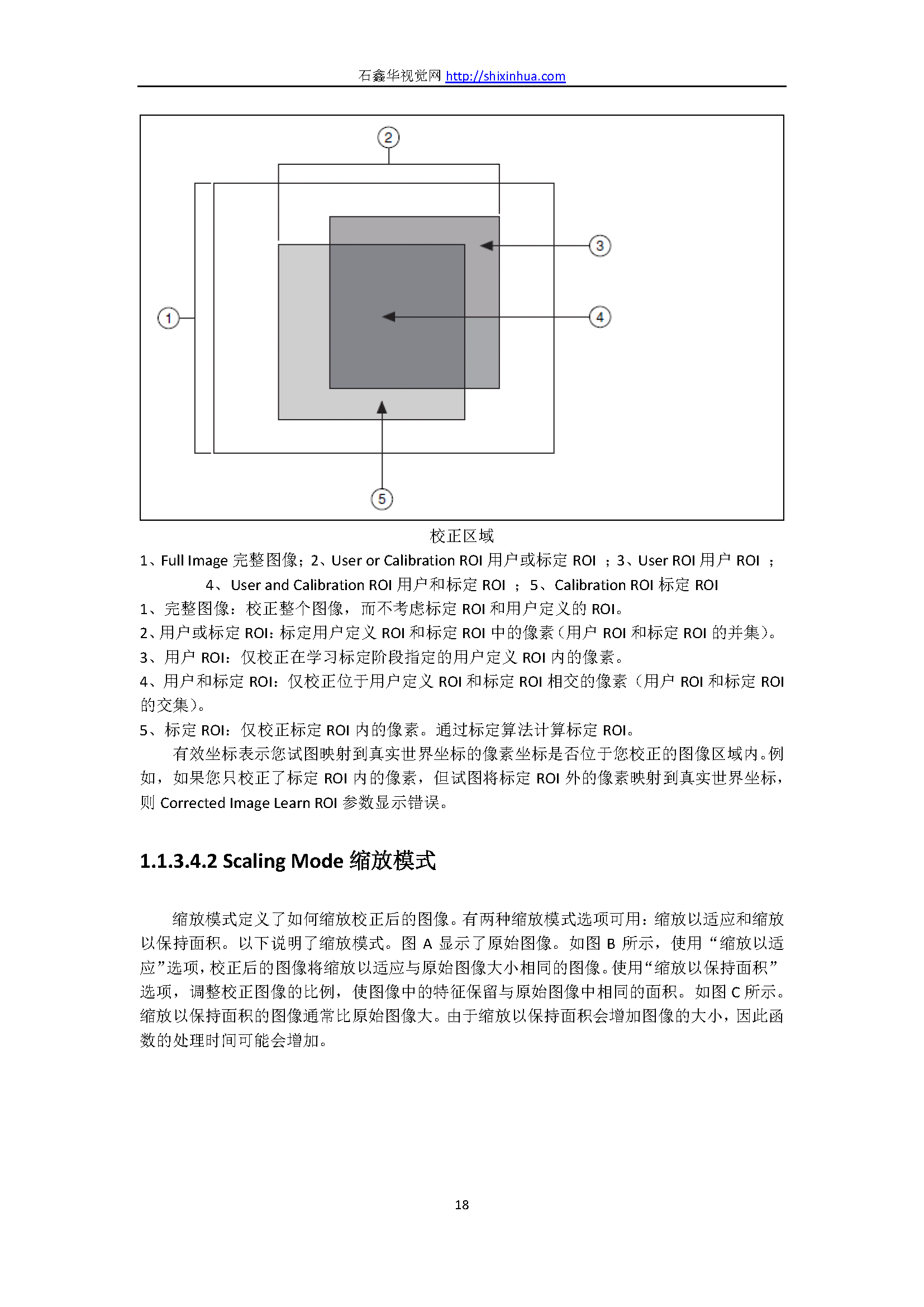
1.1.3.4.1 Correction Area校正区域 17
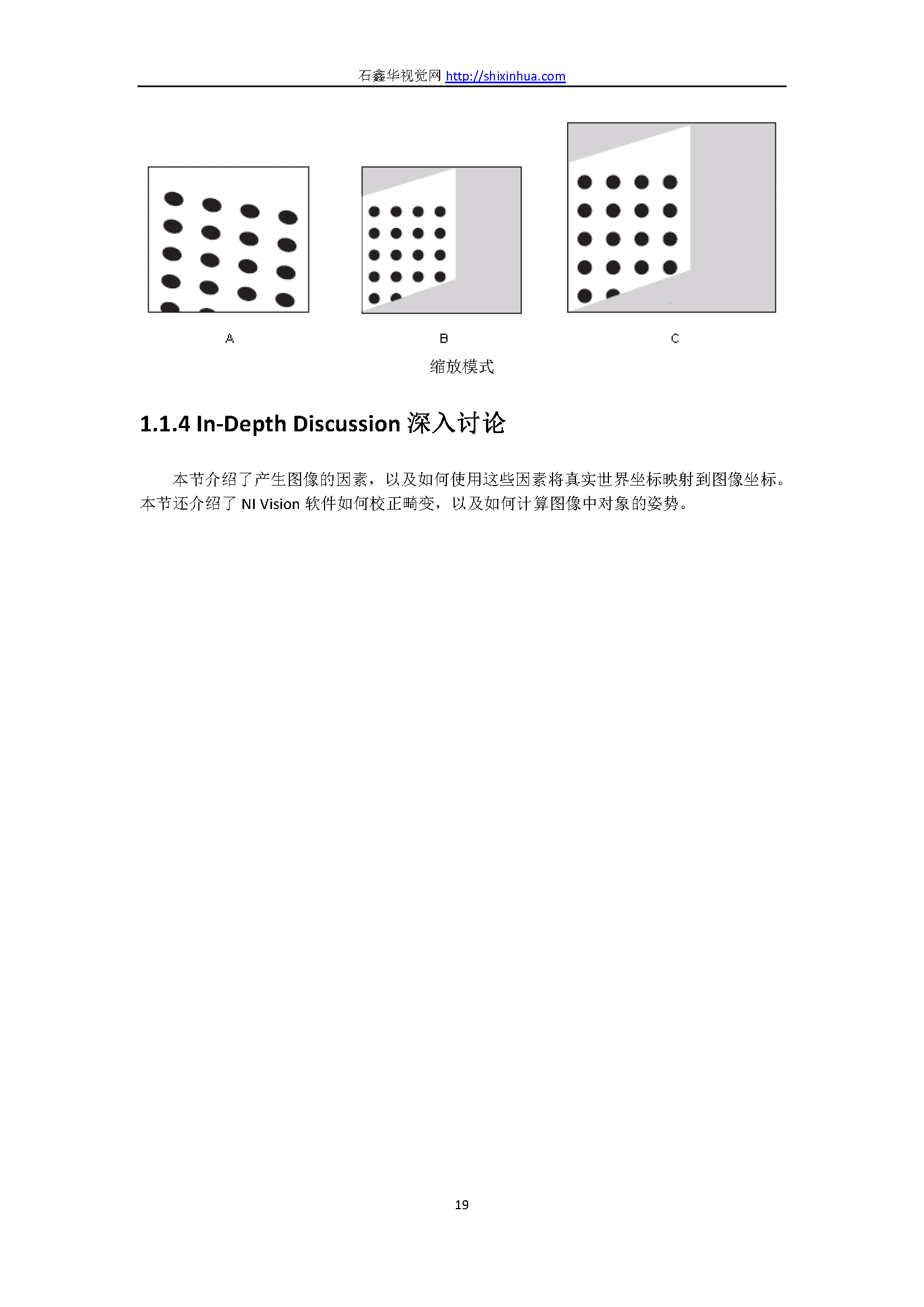
1.1.3.4.2 Scaling Mode缩放模式 18
1.1.4 In-Depth Discussion深入讨论 19
1.1.4.1 Homography单应性 22
1.1.4.1.1 Camera Matrix相机矩阵 23
1.1.4.1.2 Homography Matrix单应性矩阵 24
1.1.4.2 Lens and Camera Distortion镜头和相机畸变 24
1.1.4.2.1 Division Distortion Model除法畸变模型 25
1.1.4.2.2 Polynomial Distortion Model多项式畸变模型 26
1.1.4.2.3 Using the Polynomial Distortion Model to Correct Radial Distortion用多项式畸变模型校正径向畸变 26
1.1.4.2.4 Using the Polynomial Distortion Model to Correct Tangential Distortion用多项式畸变模型校正切向畸变 27
1.1.4.3 Determining the Pose of an Object确定目标的姿势 27
1.1.4.3.1 Calculating the Pose of an Object计算目标的姿势 27
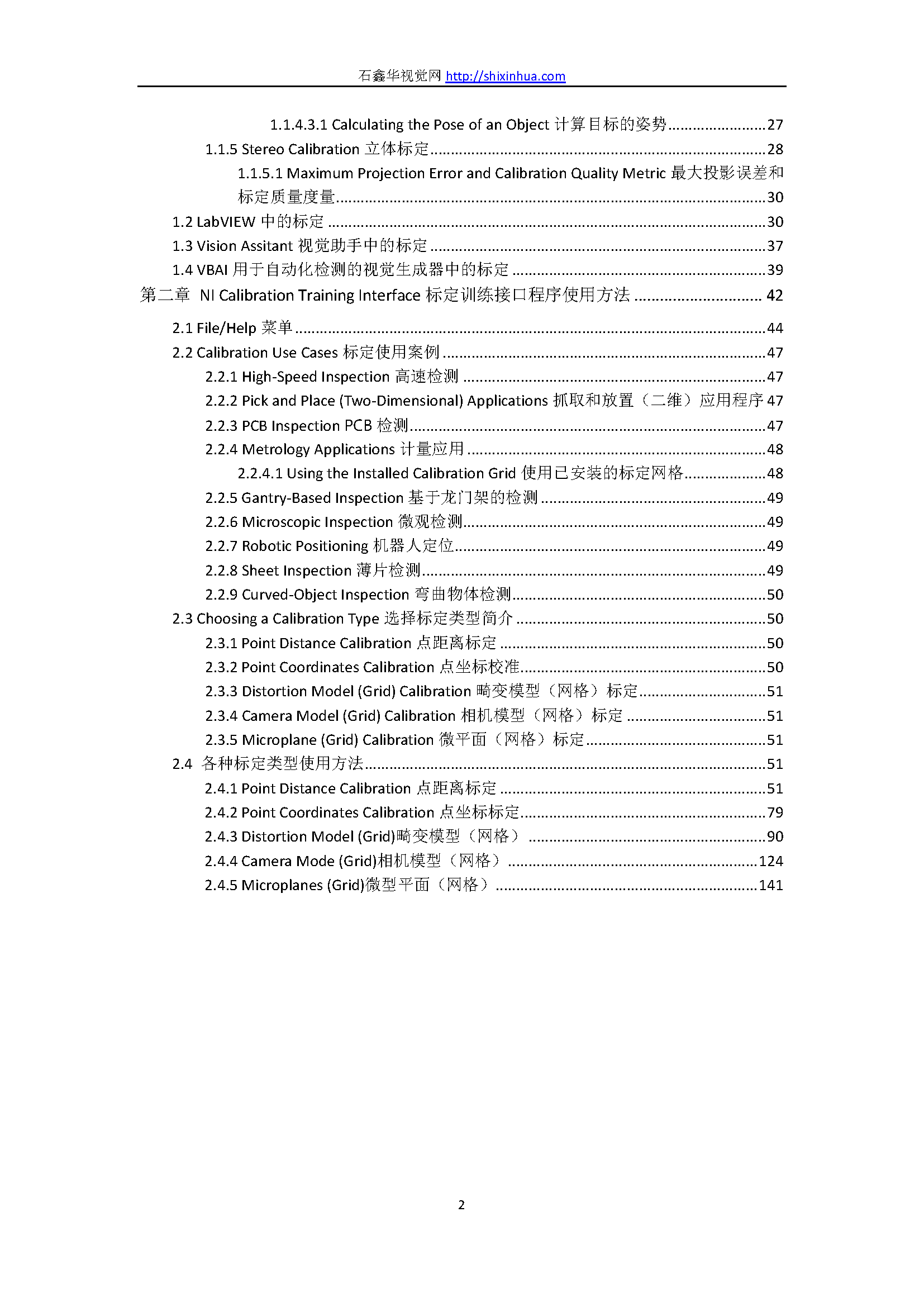
1.1.5 Stereo Calibration立体标定 28
1.1.5.1 Maximum Projection Error and Calibration Quality Metric最大投影误差和标定质量度量 30
1.2 LabVIEW中的标定 30
1.3 Vision Assitant视觉助手中的标定 37
1.4 VBAI用于自动化检测的视觉生成器中的标定 39
第二章 NI Calibration Training Interface标定训练接口程序使用方法 42
2.1 File/Help菜单 44
2.2 Calibration Use Cases标定使用案例 47
2.2.1 High-Speed Inspection高速检测 47
2.2.2 Pick and Place (Two-Dimensional) Applications抓取和放置(二维)应用程序 47
2.2.3 PCB Inspection PCB检测 47
2.2.4 Metrology Applications计量应用 48
2.2.4.1 Using the Installed Calibration Grid使用已安装的标定网格 48
2.2.5 Gantry-Based Inspection基于龙门架的检测 49
2.2.6 Microscopic Inspection微观检测 49
2.2.7 Robotic Positioning机器人定位 49
2.2.8 Sheet Inspection薄片检测 49
2.2.9 Curved-Object Inspection弯曲物体检测 50
2.3 Choosing a Calibration Type选择标定类型简介 50
2.3.1 Point Distance Calibration点距离标定 50
2.3.2 Point Coordinates Calibration点坐标校准 50
2.3.3 Distortion Model (Grid) Calibration畸变模型(网格)标定 51
2.3.4 Camera Model (Grid) Calibration相机模型(网格)标定 51
2.3.5 Microplane (Grid) Calibration微平面(网格)标定 51
2.4 各种标定类型使用方法 51
2.4.1 Point Distance Calibration点距离标定 51
2.4.2 Point Coordinates Calibration点坐标标定 79
2.4.3 Distortion Model (Grid)畸变模型(网格) 90
2.4.4 Camera Mode (Grid)相机模型(网格) 124
2.4.5 Microplanes (Grid)微型平面(网格) 141
PDF共167页,另外附加一个35分钟的多点标定(图像坐标系与机械手坐标系转换,或者类9点标定等)方法;12分钟双相机标定原理推导。